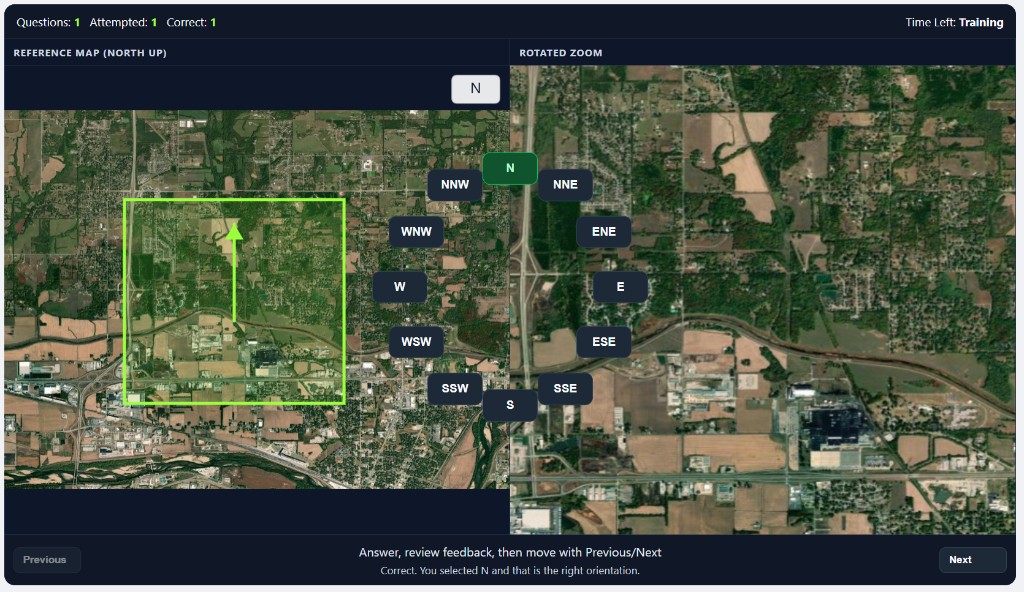
ASTB-E Terrain Identification in-game interface
Learn exactly how the Terrain Identification module works, how to decode both screens fast, and how to solve rotated-map questions with consistent accuracy.
ASTB-E Terrain Identification in-game interface
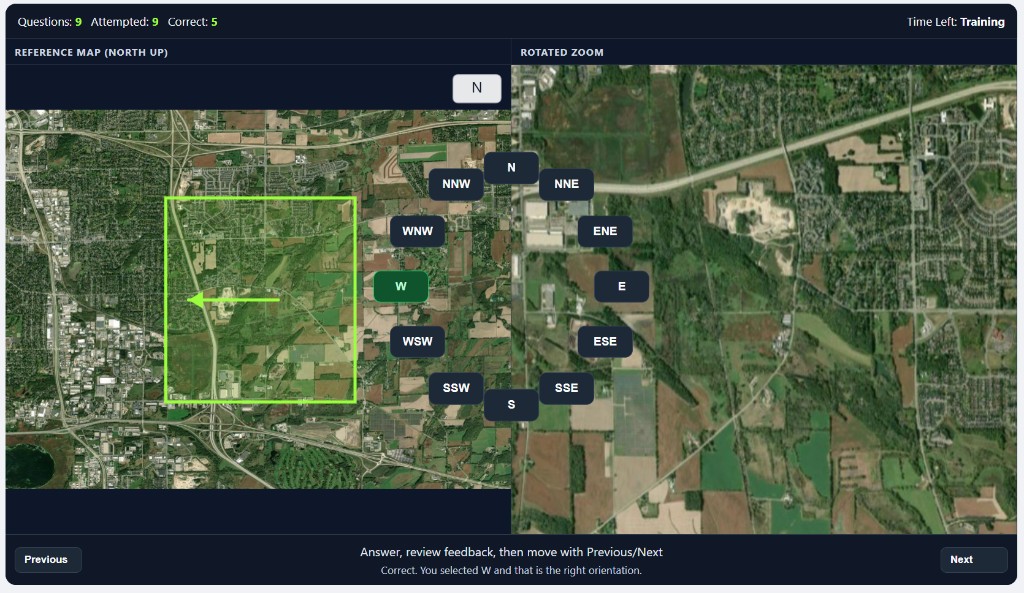
In this ASTB-E PBM module, you compare two visual panels showing the same terrain from map data. The left panel is your reference map with north fixed at the top. The right panel is a zoomed extract of that terrain, but rotated.
Your job is to identify the orientation of the right image as fast as possible. The answer choices are 12 compass positions: N, NNE, ENE, E, ESE, SSE, S, SSW, WSW, W, WNW, NNW.
High scores come from combining fast landmark recognition with reliable orientation matching. The test rewards both speed and consistency under pressure.

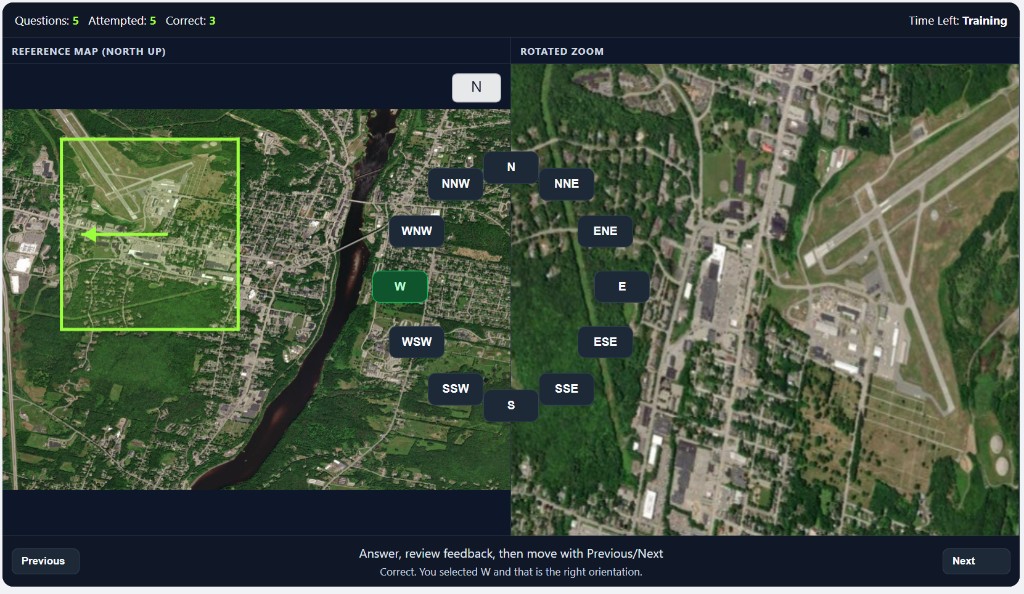
ASTB-E Terrain Identification workflow example
Start with a clear landmark: a curved road junction, shoreline bend, river fork, or unusual urban block shape.
Use a second reference to avoid guessing. Two-feature confirmation sharply reduces direction mixups.
Match the rotation quickly, choose one of the 12 compass options, and move on without over-checking.
The left screen is your stable reference. North is always up, so this panel gives you the fixed directional baseline. Treat it like your orientation anchor: every decision should be relative to this map, not relative to your intuition from the rotated panel.
Best practice: scan for high-contrast geometry first (intersections, coastline edges, terrain contours) before looking at small details. Big shape patterns are faster and more robust under timed conditions.
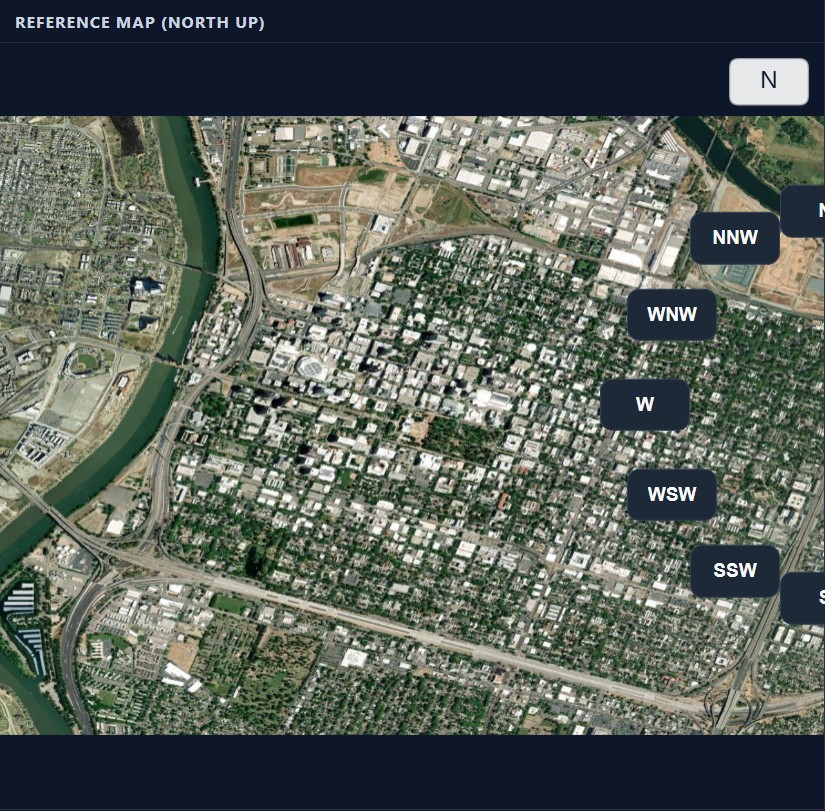
Detailed view of the left reference map (north-up baseline)
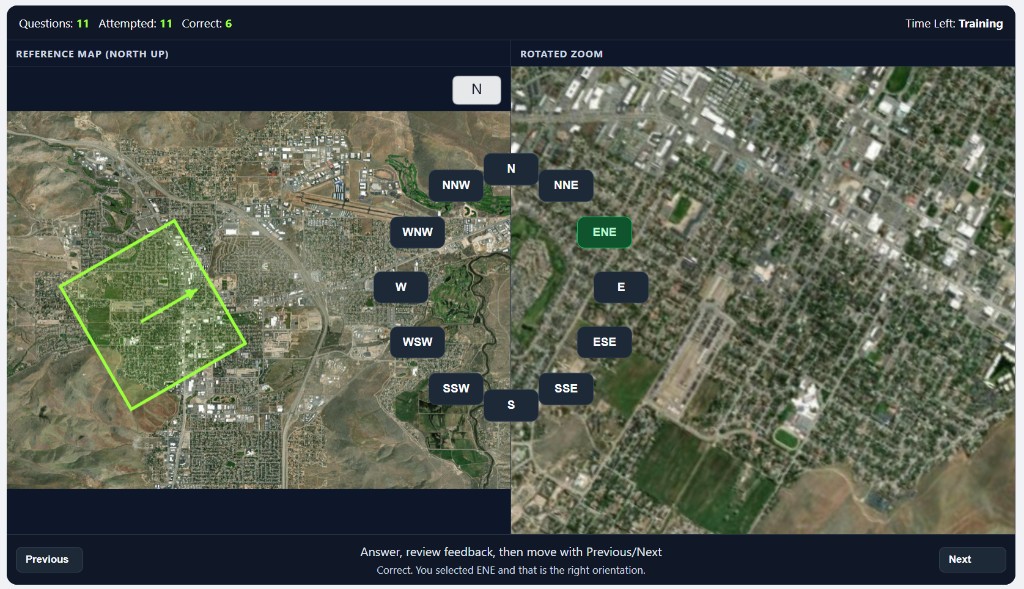
The right screen shows a rotated zoom of terrain taken from the same map family. Your task is to determine which compass orientation matches that rotation. This is where most errors happen: candidates spot the right location but choose a neighboring direction (for example ENE instead of E).
Use a repeatable sequence: identify one landmark in the zoom, place it on the left map, estimate the rotation, then verify with a second landmark before selecting. This method is faster long-term than one-feature guessing.
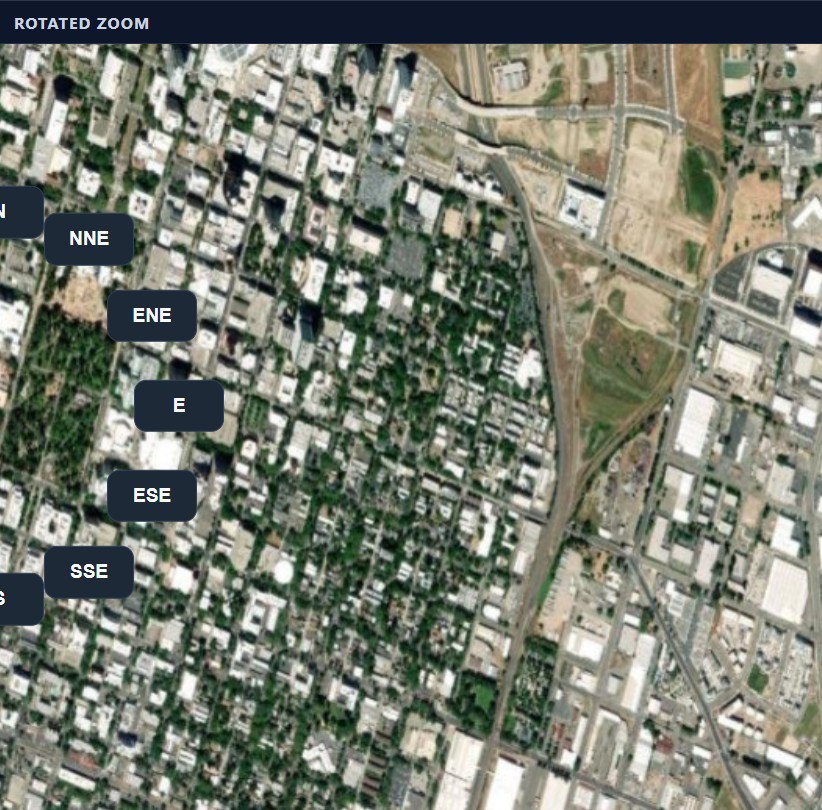
Detailed view of the right rotated zoom and orientation selection area
Use these examples to practice the exact solving process. Each slide shows a placeholder image plus the reasoning sequence to reach the correct orientation.


Spotting one feature and answering immediately often causes near-direction errors. Always validate with one additional feature.
Over-focusing on tiny map details slows you down. Start with large terrain geometry, then refine only if needed.
Candidates sometimes change orientation logic mid-question. Use the same sequence every time to stay consistent.
Angles like E and ENE are common confusion points. Use one tie-break landmark instead of pure visual feel.
It measures how quickly and accurately you can recognize orientation by matching a rotated terrain zoom to a north-up reference map under time pressure.
The left side is a reference map with north fixed at the top. The right side is a zoomed extract of that same terrain, rotated to one of twelve possible orientations.
Use a stable loop: identify one unique terrain feature, anchor it on the left map, estimate the right-image rotation, then confirm with a second feature before selecting.
Answering from visual guess alone without cross-checking two landmarks. This causes avoidable orientation errors, especially between neighboring directions like ENE/E or SSW/S.
Build faster orientation recognition with realistic PBM-style practice and repeatable solving patterns.